The Yellow Jacket Robot Project Report
Figure 1.
Figure 2.
March Madness: Background
Ramji Srinivasan
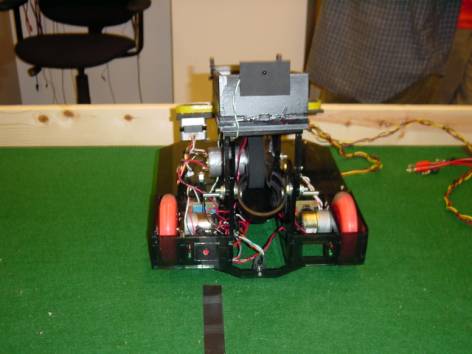
Figure 1.
Figure 2.
Ramji Srinivasan
Ask most people what ‘March Madness’ means, and you’re likely to get a line about college hoops. But for the students of EE 118: Introduction to Mechatronics, the phrase has a slightly different connotation (see the official handout). ‘March Madness’ is the title given to EE 118 students’ final project: the design and implementation of a nerf-basketball shooting robot.
The basic premise is as follows: the robot is positioned at the free throw line (see Figure 2) with a random orientation. When the competition starts, an infrared (IR) beacon atop one of the goals will begin emitting a signal. The IR signal determines which basket the robot should deliver balls to. Thus, if the IR beacon atop the left goal is emitting, the robot should deliver balls to the left goal. The beacon atop a given goal shuts off if and only if a ball is delivered to (i.e. clears the rim of) that goal. A human controller does the actual switching. Furthermore, only one IR beacon is emitting at any given time, eliminating ambiguity between shots.
The competition, which lasts for a total of two minutes, is further broken down into an initial period and bonus period. In the initial period, the order that the beacons will be switched on (assuming the balls are delivered properly) may be one of two combinations: 1) center, left, right or 2) center, right, left. If the robot successfully delivers its balls in the initial period, it progresses to the bonus round, in which the IR beacons are switched at random. Scoring is fairly simple: shots taken at the free-throw line are worth one-point; shots to the right of the three-point line (but not from the free-throw line) are worth two points; and shots from behind the three-point line are worth three points. Thus a robot that simply stays at the free-throw line may rack up a decent amount of baskets, but its point total may not be as great as one that just shoots from downtown. Similarly, a robot that tries to shoot three-pointers requires the overhead of building a drive mechanism, no small task unto its own. Clearly, the problem allowed for a variety of solutions, each with interesting costs and benefits. Our design choice, a three-point shooter, was borne out of a desire to be extremely adjustable while accumulating the highest point total possible.
© Copyright 2001