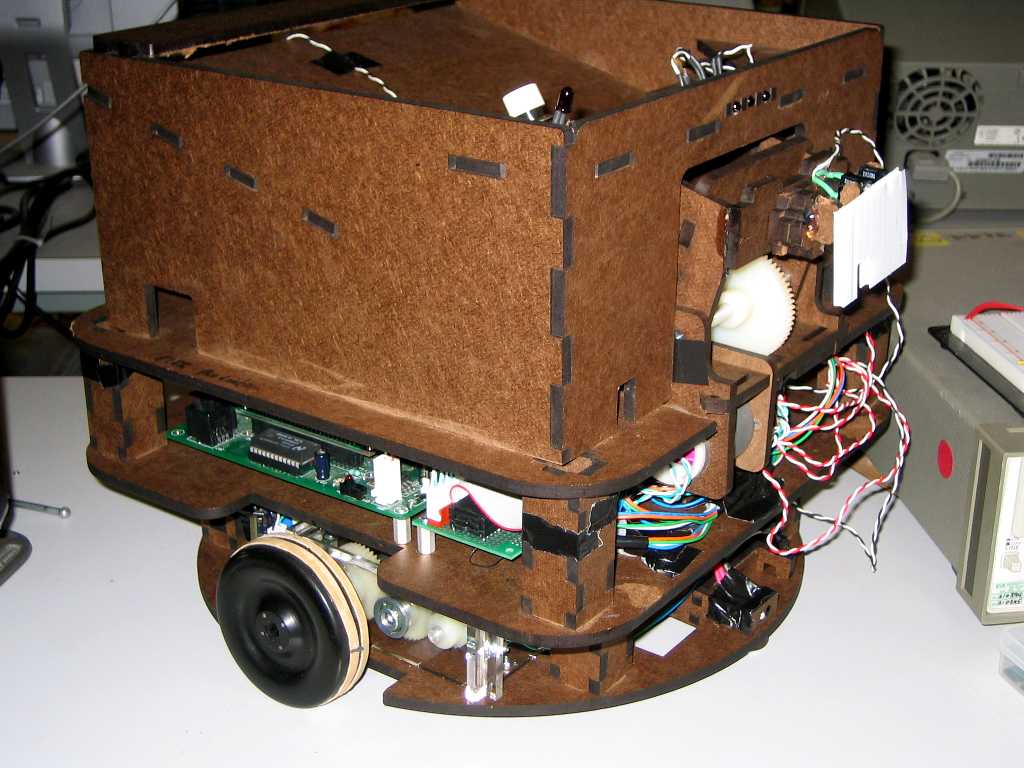

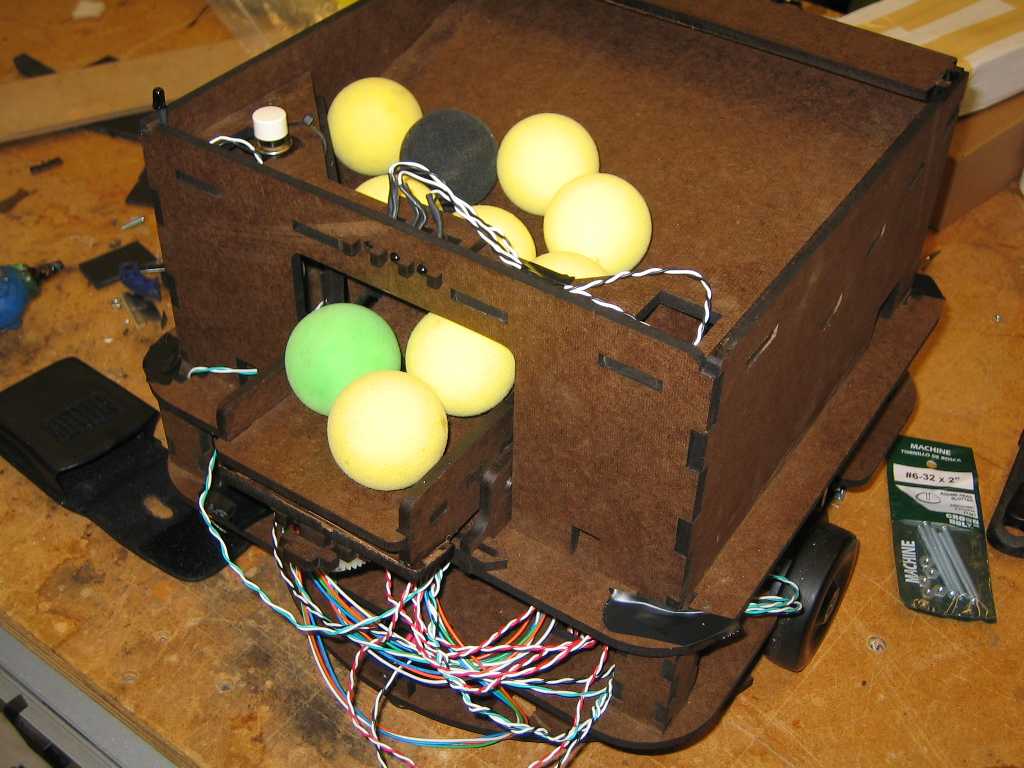


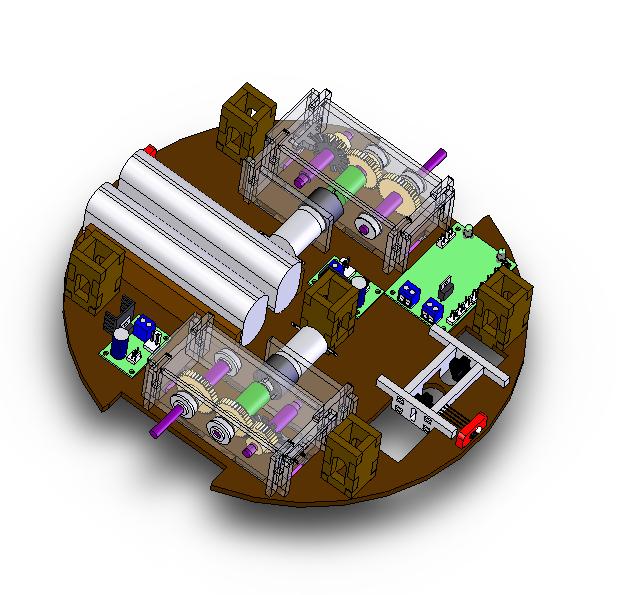
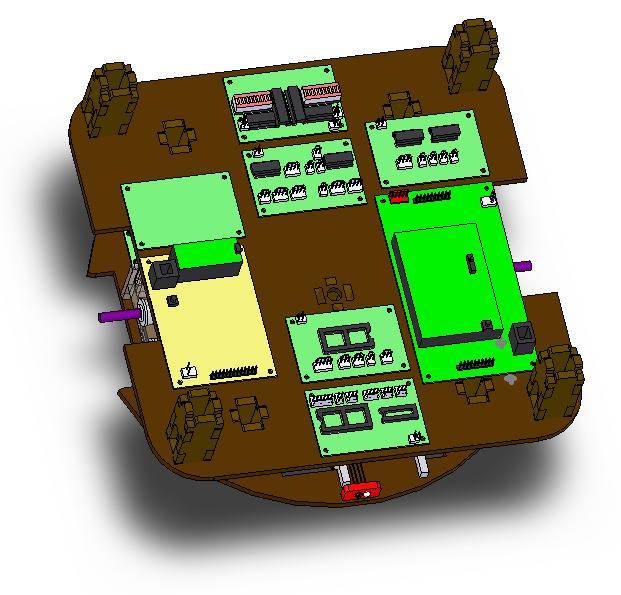
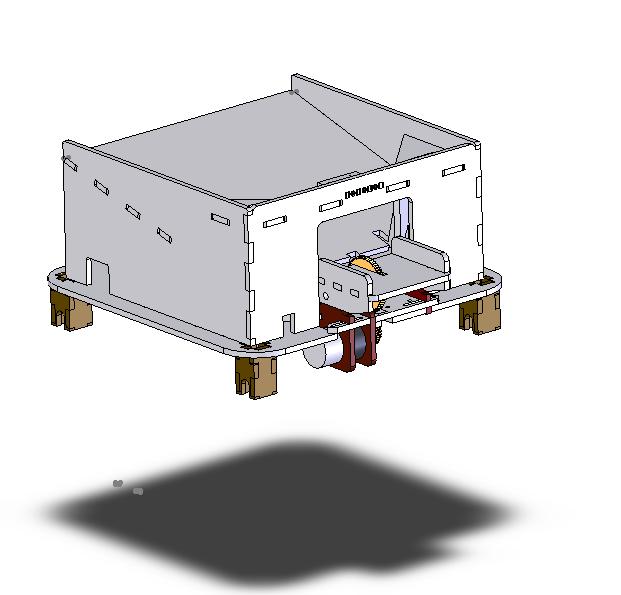
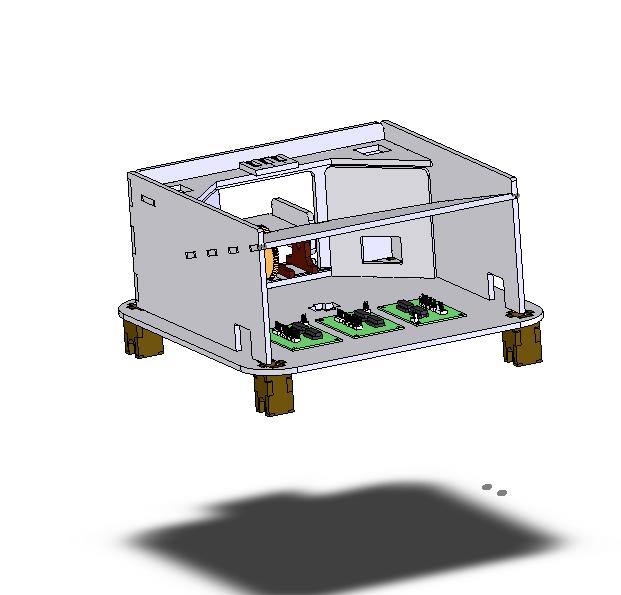
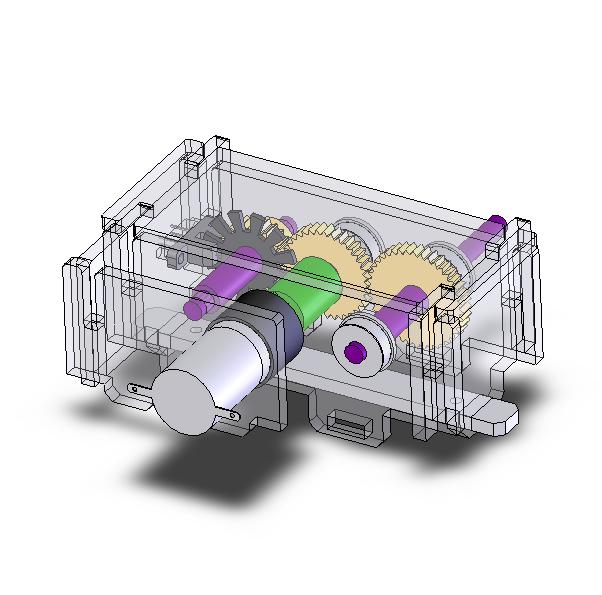
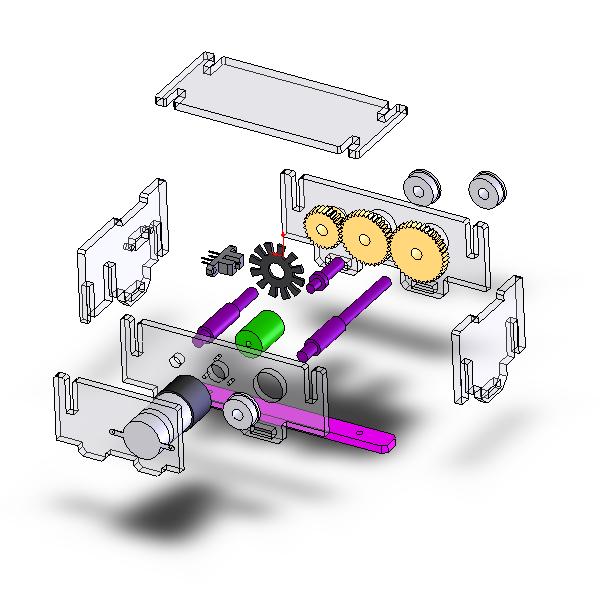
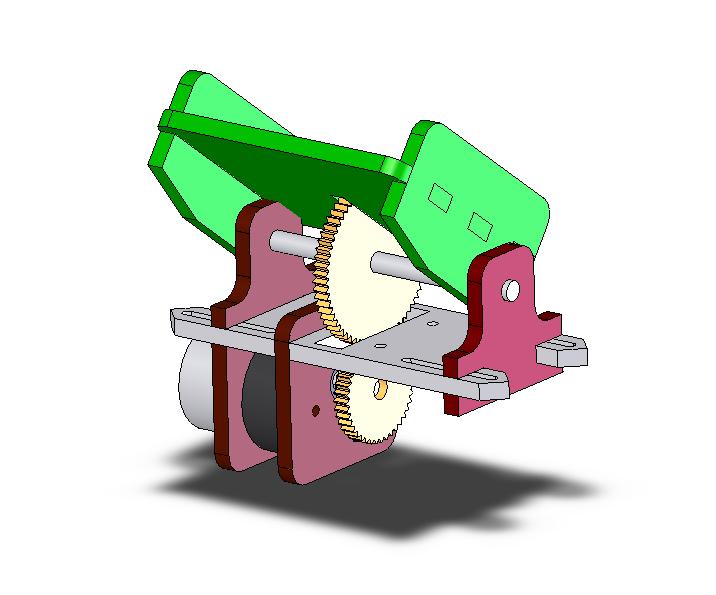
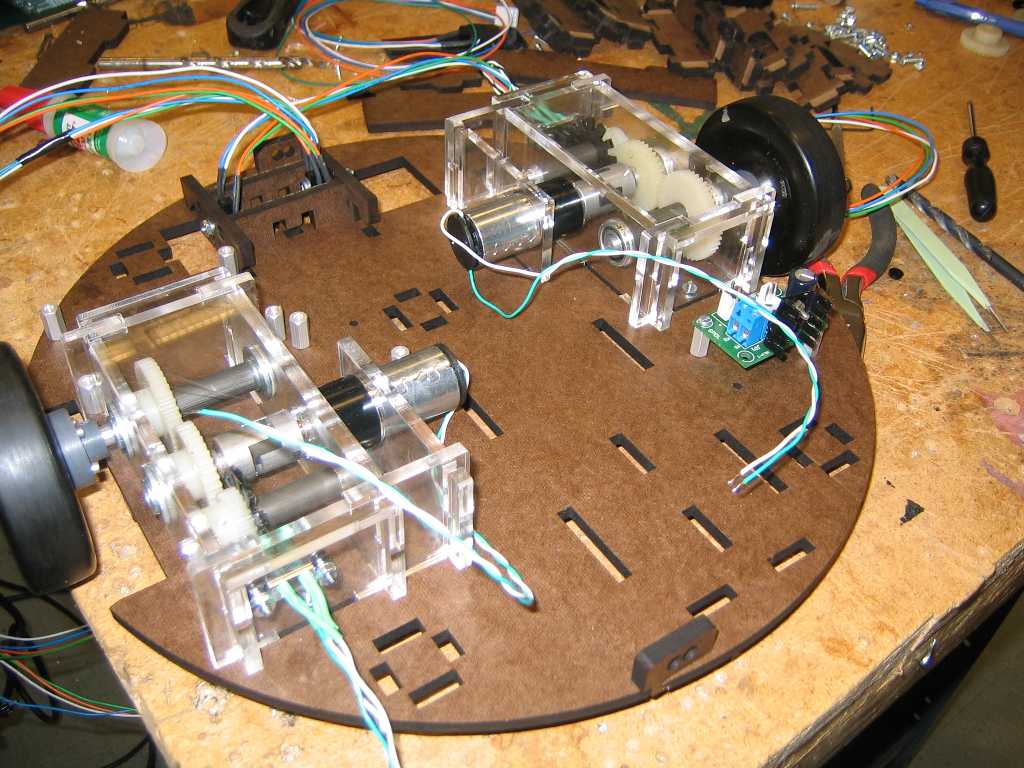
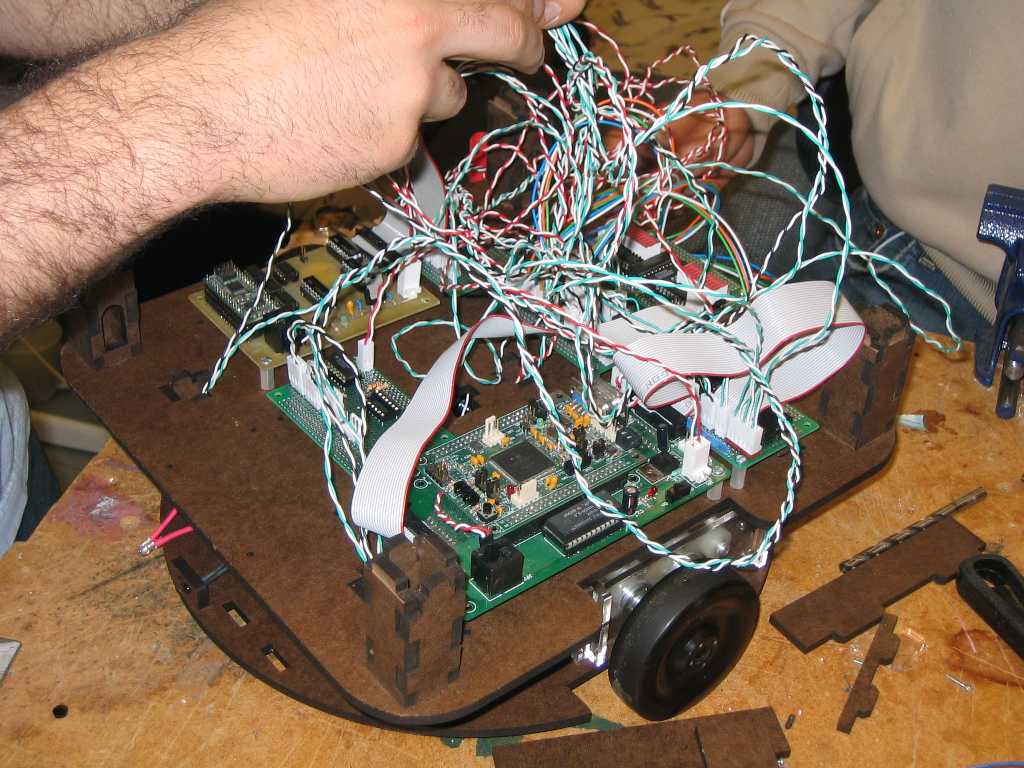
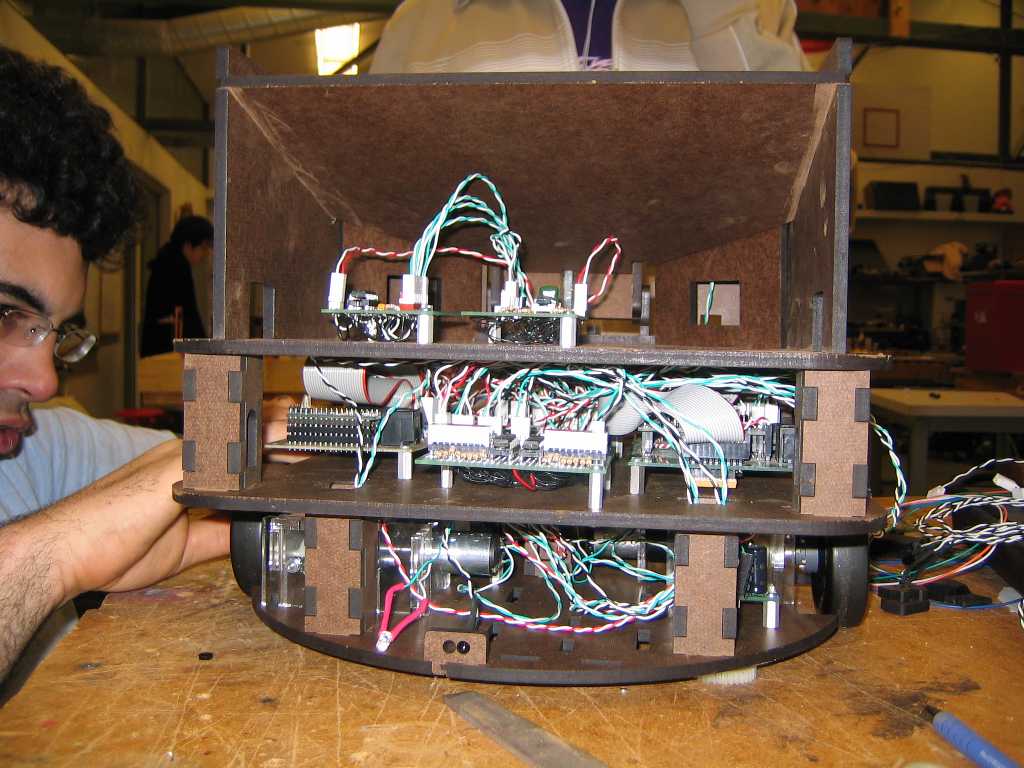
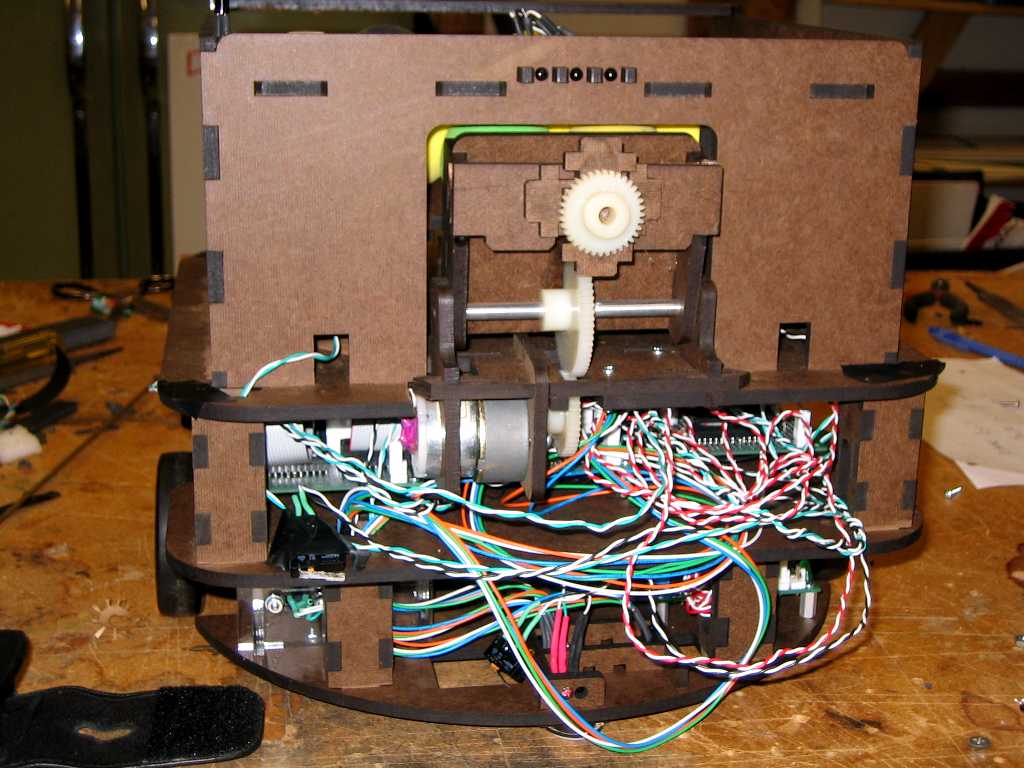
!Happy Fun Ball! In Stanford's ME218B course, our final project presented a challenging mix of tasks with the ultimate goal of scoring nerf balls into various goals for points. Our design approach leveraged the use of encoders, a gearbox for the drive-train, and two communicating micro-controllers to create a fast-paced, precision-movement robot. At times this blazing speed caused our robot to be a bully on the playing field, hence our team name, "Team Finesse"... Explore our site to learn more about how this project was developed!
 |
 |
 |
 |
 |
 |
 |
 |
|
 |
|
 |
 |
 |
 |
|
 |
|
 |
|
 Mark Sherwood, Stanford BS in Symbolic Systems
Mark Sherwood, Stanford BS in Symbolic Systems
(msherwood at stanford dot edu)
 Ezra Schiff, Stanford BS in Mechanical Engineering
Ezra Schiff, Stanford BS in Mechanical Engineering
(ezra.schiff at gmail dot com)
 Mike Rode, University of Washington BS in Mechanical Engineering
Mike Rode, University of Washington BS in Mechanical Engineering
(mjrode at stanford dot edu)
This page is for a Stanford University SPDL course, ME218B: Smart Product Design Applications. The course was taught by Matt Ohline in Winter Quarter 2008.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}