How to Play
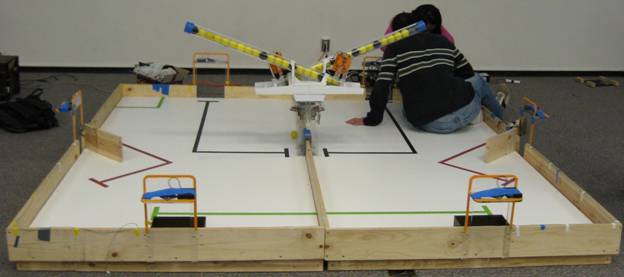
The object of the game is to move Happy Fun Balls from the dispenser in the middle of the playfield into goals located around the perimeter of the field. The point values of each goal vary with their relative difficulty. Goal 1, the goal on the far side of the field in the image above, is worth two points. Goal 2, the goal across from the Happy Fun Ball dispenser, is worth three points. Goal 3, the closest goal in the image above, is worth four points. After two minutes has passed, or one robot has moved all of its Happy Fun Balls into the goals, the robot with the most points wins.
The black balls in the dispenser are Super Happy Fun balls. If these balls are placed in Goal 3 they are worth eight points instead of the usual four. A Super Happy Fun Ball in any other goal is worth the normal amount of points.
Robots request balls from the dispenser by pushing on a panel for one second. After a successful request, the dispenser will release a ball into the robot. After five balls are requested consecutively, the delay between ball drops is increased to three seconds. If a robot leaves the dispenser for more than ten seconds, the dispenser will reset and resume dispensing balls once per second.
Robots navigate the field using the colored tape and infrared beacons at the dispenser and goals. Each beacon pulses with a frequency of 1.25 kHz and different beacons have different duty cycles. The beacon at the dispenser has a 50% duty cycle, Goal 1 is 30%, Goal 2 is 70%, and Goal 3 is 90%.
More details about gameplay and the requirements for this project may be found in the original project assignment here.
Our strategy for the game was to collect 5 happy fun balls at a time, since they dispense at the quickest rate, and then run them to goal 3 since goal 3 is worth the most amount of points. When goal 3 became full, which turned out to be 10 balls because of the foam addition to goal 3, we deposited the remaining 10 balls into goal 1. We thought that we would be able to beat out the competition since we were one of the smallest and fastest robots. The time delay to dispense happy fun balls increased to 3 seconds after receiving the first 5 balls. If we could shoot to the goal, drop the balls and return to the dispenser fast enough, that would help keep our robot small and mobile. We were able to go back and forth from goal 3 in 18 seconds.
Originally, we started tape following the whole distance to and from goal 1. This was a very accurate method, but slow. After we gained confidence in our robot's performance, we started to cut corners by setting one wheel at a faster duty cycle than the other to arc the robot until it hit the tape so that the robot had to line follow for a shorter period of time. We were able to complete the full game and deposit 10 balls into goal 3 and 10 balls into goal 1 in less than 2 minutes.