Dumping
Chute
Ball Funnel:
 Once
at the dispenser, the ‘bot drives forward and backward for set time periods,
using the ram on the front to request balls from the
Once
at the dispenser, the ‘bot drives forward and backward for set time periods,
using the ram on the front to request balls from the
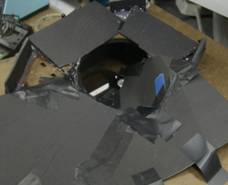
dispenser. The ball falls onto the top deck, where a
series of foam core and poster board ramps guide it into the intended
path.
Ramp:
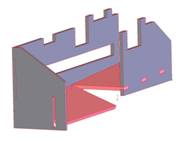
 Once in the bot, the ball rolls down an incline, then
falls off of a ledge onto a ramp that is tilted towards the
Once in the bot, the ball rolls down an incline, then
falls off of a ledge onto a ramp that is tilted towards the
dumper tubes.
The first incline gives the ball enough speed that it will naturally
fall into the tube further away,
unless it is full, in which case it will fall into
the closer tube, which prevents the balls from jamming and ensures
that they all make it into the dumper tubes.
Dumping Chute:
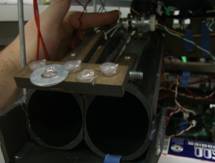
 The dumper tubes are two ABS pipes side by side, each
sized to hold 5 balls (one tube for 10 balls is longer than can fit on the
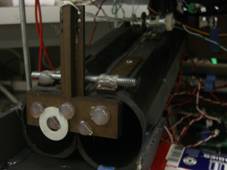
‘bot). There is a simple hinged gate
mechanism placed at the end of the tubes to keep the balls from falling
out. On the other side of the hinge is a
lever arm which is connected with a line to a simple DC motor. When it is time to dump the balls, the motor
is turned on and the line winds up around the spool attached to the motor
shaft, which opens the gate. The gate
stays open as long as the motor is powered (stalled), then drops when power is
removed.
The dumper tubes are two ABS pipes side by side, each
sized to hold 5 balls (one tube for 10 balls is longer than can fit on the
‘bot). There is a simple hinged gate
mechanism placed at the end of the tubes to keep the balls from falling
out. On the other side of the hinge is a
lever arm which is connected with a line to a simple DC motor. When it is time to dump the balls, the motor
is turned on and the line winds up around the spool attached to the motor
shaft, which opens the gate. The gate
stays open as long as the motor is powered (stalled), then drops when power is
removed.
 Because the motor needs to remain stalled for a
fairly long period, we chose a very cheap DC motor with a high internal
resistance, which prevents it from
Because the motor needs to remain stalled for a
fairly long period, we chose a very cheap DC motor with a high internal
resistance, which prevents it from
drawing too
much current during this period.
The
circuit for the gate is a simple one, with an IRLZ34N (High power N-channel)
MOSFET to switch it on when it receives the command
from
the E128, and a zener and diode combination to protect the transistor from kickback. The power for this motor comes from the
adjustable regulator,
allowing
tuning of the speed of the gate opening.