Ball Requester:
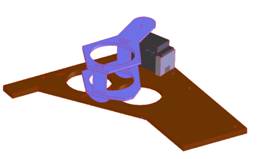
The ball requester was a
scotch yolk mechanism (picture to right) that was driven by a servo motor. The
pushing arm and housing for this component were made out of  masonite. The ball requester was mounted on the underside of the uppermost
deck, forward-facing, so that when the robot arrived at the ball dispenser, it
was ready to request balls.
masonite. The ball requester was mounted on the underside of the uppermost
deck, forward-facing, so that when the robot arrived at the ball dispenser, it
was ready to request balls.
The servo motor was driven by
5 volts and given two different PWM values to hold the pusher arm in two
positions: extended and retracted. Timers were used to control the pushing
time, retracting time, pause time between ball requests, and pause time between
sets of 5 balls, as specified in the project guidelines.
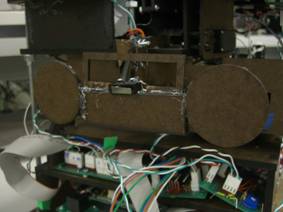
Ultimately, a ramming mechanism
(picture to left) replaced the scotch yolk mechanism due to the change in
strategy.
Ball Sorter:
The ball sorter was made out
of masonite and featured a
swiveling sorter arm that was driven by a servo motor. The sorter arm received
balls in its neutral position, and then pivoted to the drop holes on either its
right or left side to store or shoot balls appropriately. A switch was mounted
in the masonite platform
directly under the sorter arm’s neutral position. The purpose of this switch
was to indicate when a ball was resting inside of the sorter arm. Additionally,
a tape sensor was mounted on the sorter arm for use as a ball color detector.
The servo motor was driven by
5 volts and given three PWM values to hold the sorter arm in three positions:
neutral, shooting, and dumping. Timers were used to control how long the sorter
arm would rest over the drop holes to avoid any jamming.
Ball Shooter:
The ball shooter was a
flywheel-style launcher, driven by a DC motor controlled using a PWM signal. A curved tube fed the balls to the wheel and
featured a slit at the bottom for the wheel to fit inside of. Fender washers
were included for added inertia. The ball shooter was mounted using masonite braces to minimize
vibration and increase stability.