Drive
Mechanism
The
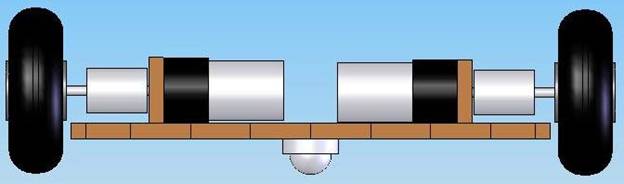
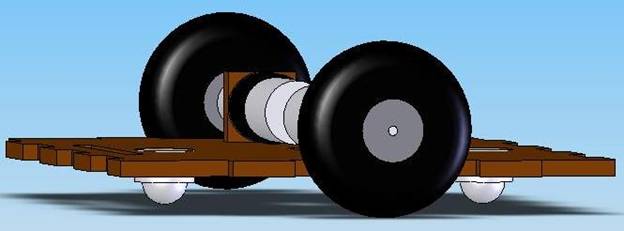
drive mechanism consists of the wheels and casters that support the robot
as well as the motors that drive it. Since the motors had gearboxes already
attached to them, the wheels were directly connected via spider couplings.
The axels connecting the wheels were supported with ball bearings embedded
in the side walls of the chassis. The ball casters in the front and back of
the robot were low-friction supports to prevent the robot from tipping over.