Design Principles
At our first brainstorm session our team established a few design tenets that guided our entire design process.
- Keep the command sequence simple:
- Detect ball dispenser beacon
- Drive toward dispenser until black tape is sensed
- Follow black tape to the dispenser
- Aim turret at Goal 3
- Extend tape measure
- Request balls
- Admire balls as they roll into Goal 3
- Reduce the amount of driving—it’s complicated, it’s risky, and it takes time. Better off staying in one place.
- Go for speed. Force the round to end quickly so the other team doesn’t have a chance to finish.
- Reach for the sky, but make sure you have a fall back. Design a system that has the potential to score 20 balls into Goal 3, but can also score in Goal 1 or 2 if our plan turns out to be too ambitious
- Do not taunt Happy Fun Ball!!
Design
The below images and files illustrate the design and layout of the sub-systems on the Open Loop bot:
-
Bottom Iso View -
Iso View -
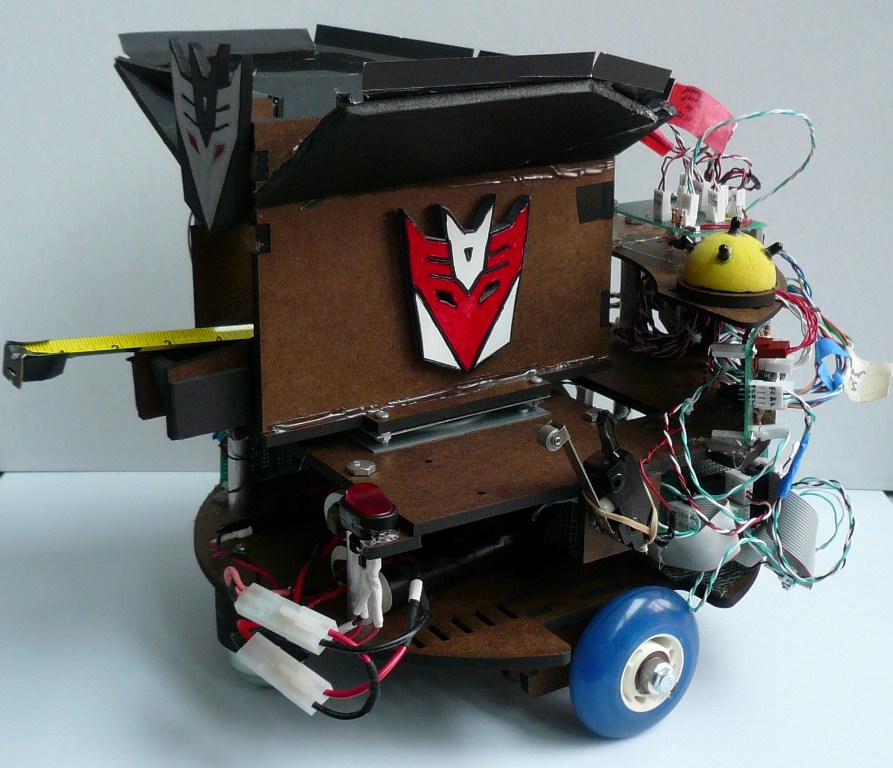
Side View w/ tape measure cutaway -
Labeled Back View
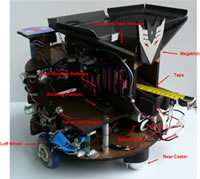
-
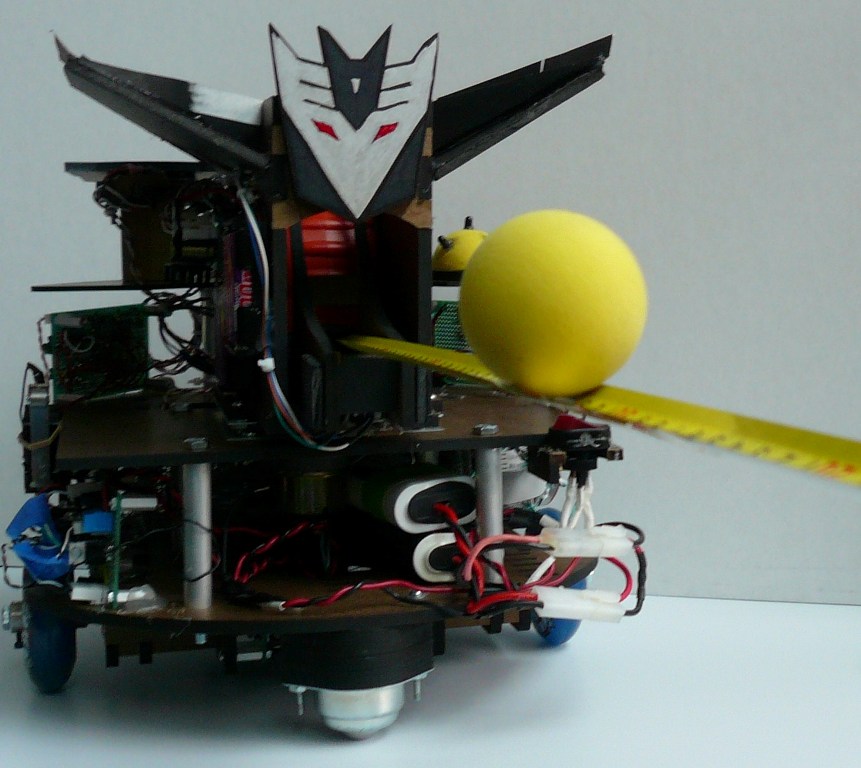
Labeled Front View

-
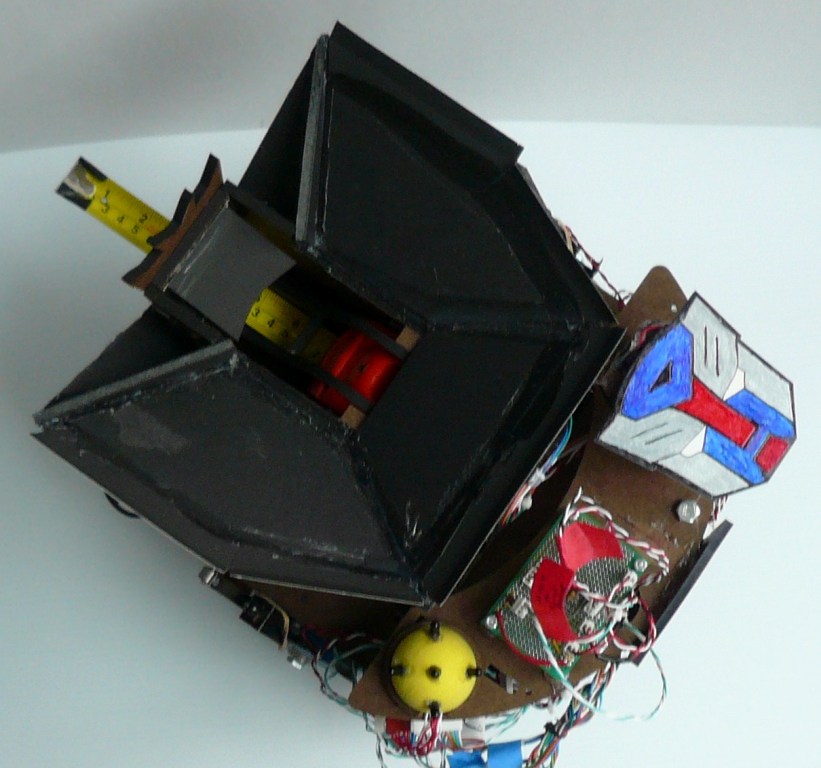
Labeled Bottom View





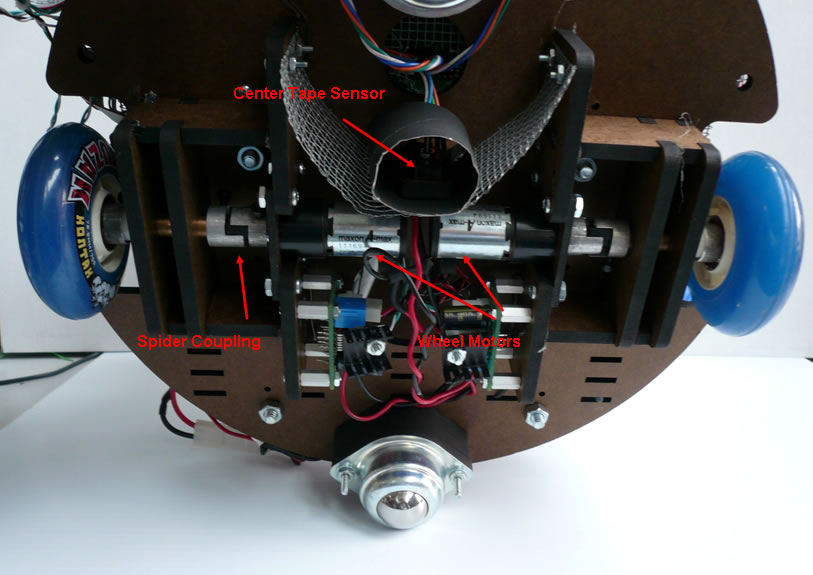
Drive Train
While the maxon motors provided for use in the project provided ample torque and performance for the drive train without further gearing, their short, small diameter shafts were inadequate for the direct mounting to the drive train. Spider couplers and bronze journal bearingswere therefore used in conjunction with roller blade wheels and 1/4-20 bolt axles to robustly mount and support the drive wheels. Given the ultimately considerable weight of the robot, this was a necessary design decision. The two drive wheels were complimented by two ball bearing casters in the fore and rear of the robot.
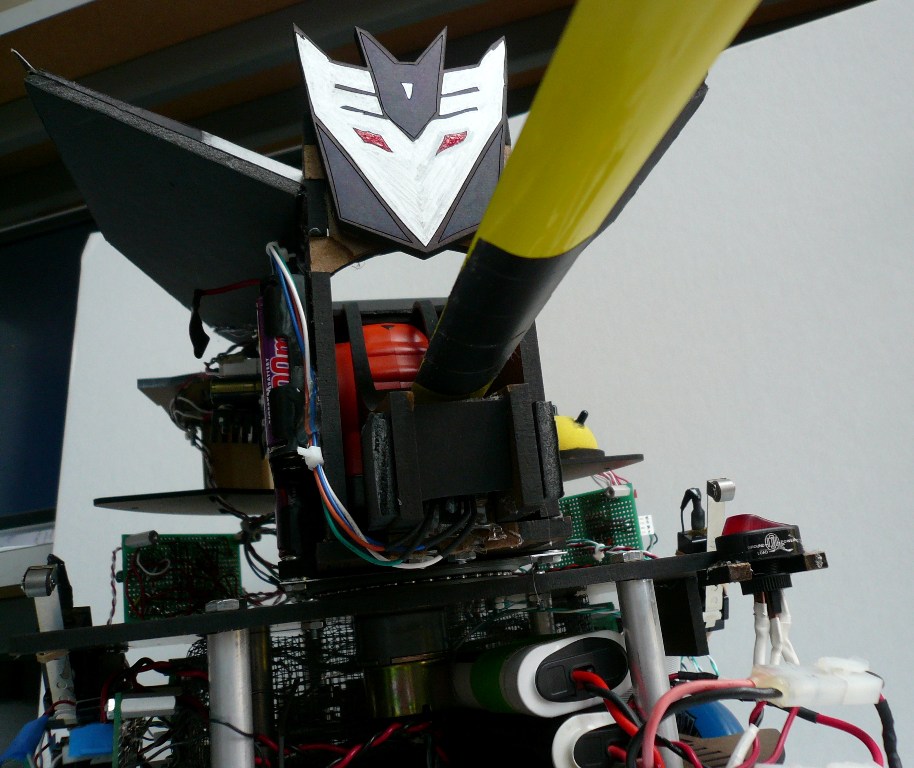
Turret
Aside from the drive train, the other key component of the mechanical design was the turret responsible for aiming balls at the different goals. A lazy susan bearing from OSH was used to mount the turret. A heavily geared DC motor with a keyed shaft was used to drive the turret. Position control was achieved using limit switches at either extreme of the desired range of motion.
Frame
In addition to providing mounting and determining positioning of key components such as tape sensors, motors, and the turret, the rest of the robot frame was designed to be both modular and open in order to accomodate as many options as possible for mouting additional perf-boards, sensors, batteries, and to route wiring. While significant reductions in weight could have been achieved with a less substantial structure, the benefits of a sound structure and ready availability of surfaces for mounting outweighed the benefits, given our minimal-driving strategy.